 100% Australian owned
100% Australian owned

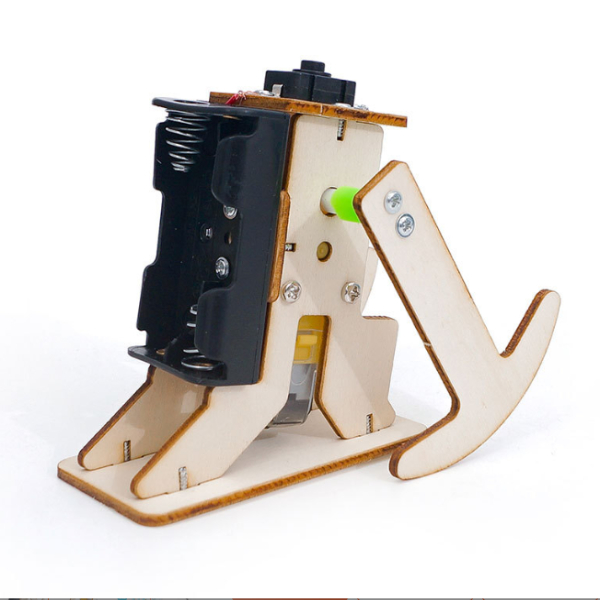

SwitchedOnToys – Walking Robot: The walking robot is a remarkable example of a bionic robot designed to mimic the walking movements of animals or humans. By replicating biological locomotion, this innovative model demonstrates how mechanical systems can navigate various terrains and environments effectively.
Educational Value:
-
STEM Learning: The walking robot provides an engaging way to explore the principles of biomimicry and robotic locomotion. It illustrates how replicating natural movements can lead to advanced engineering solutions.
-
Hands-On Experience: Assembling and operating the walking robot offers valuable hands-on experience with mechanical systems that mimic biological functions. It helps students understand the complexities of movement and how robots can be designed to traverse diverse surfaces.
-
Teaching Resources: This model serves as an effective teaching tool for discussing concepts related to mechanical design, robotics, and the application of biological principles in technology. It highlights the practical benefits of designing robots that can adapt to different environments.
-
Innovative Design: The walking robot’s design showcases the potential of combining biological insights with mechanical engineering to create versatile robots. It demonstrates how advanced design can enhance functionality and adaptability in various applications, from exploration to search and rescue.
Overall, the walking robot offers a unique and educational perspective on how biomimicry can inspire robotic design, providing a practical example of how nature’s solutions can be applied to modern engineering challenges.
Key Features of Walking Robots
-
Mechanical Structure:
Legs and Joints: Walking robots feature legs and joints designed to mimic those of biological organisms. These joints enable coordinated movement that emulates the walking patterns of animals or humans, facilitating diverse locomotion strategies.
Actuators: Motors or servos drive the movement of the robot’s legs and joints. These actuators provide precise control, allowing the robot to execute complex movements and maintain stability.
-
Control Systems:
Sensors: To navigate and interact with their environment, walking robots are equipped with sensors such as cameras, infrared sensors, and gyroscopes. These sensors help the robot detect obstacles, monitor terrain, and adjust its movement accordingly.
Algorithms: Sophisticated control algorithms process data from the sensors and coordinate leg movements to achieve stable walking. These algorithms often include feedback loops and real-time adjustments to adapt to dynamic conditions.
-
Power Source:
Batteries: Walking robots are typically powered by rechargeable batteries, which provide the necessary energy for operation. The type and capacity of the battery depend on the robot’s size, weight, and energy demands.
-
Stability and Balance:
Balance Mechanisms: Walking robots incorporate various stability mechanisms, such as dynamic balancing systems or static stability designs, to ensure smooth movement and prevent tipping over.
Gait Patterns: The robot’s gait patterns are programmed to enable different types of movement, including walking, trotting, and running. These patterns are designed to provide stability and efficiency.
Types of Walking Robots
-
1. Bipedal Robots:
Design: Mimic human walking with two legs, replicating the bipedal locomotion of humans.
Applications: Used in humanoid robots, robotic prosthetics, and exoskeletons to assist with tasks requiring human-like movement.
Example: Boston Dynamics’ Atlas robot, renowned for its advanced bipedal walking and dynamic balance capabilities.
-
2. Quadrupedal Robots:
Design: Replicate the gait of four-legged animals, such as dogs or horses.
Applications: Ideal for navigating rough terrains, performing search and rescue operations, and exploration tasks.
Example: Boston Dynamics’ Spot robot, known for its versatility and ability to traverse various environments with ease.
-
3. Hexapod Robots:
Design: Equipped with six legs, mimicking insects like ants or spiders.
Applications: Suited for traversing uneven surfaces and rugged terrains, providing stability and adaptability.
Example: Hexapod robots developed by universities for research into advanced locomotion and robotic movement.
-
4. Octopod Robots:
Design: Feature eight legs, inspired by octopuses and other eight-legged creatures.
Applications: Used in advanced research on flexible locomotion and manipulation, often in exploration and inspection roles.
Example: Octopod-inspired robots designed for complex exploration and inspection tasks.
Building a Walking Robot
-
Materials Needed:
Actuators: Motors or servos required for leg movement and control.
Sensors: Essential for navigation, obstacle detection, and maintaining balance.
Control System: A microcontroller or computer to process sensor data and command the actuators.
Frame and Legs: Constructed from materials like plastic, metal, or composites to form the robot’s body and legs.
-
Assembly Steps:
Design the Frame: Create a robust frame to support the robot’s components. Design the legs and joints to mimic the desired walking patterns.
Install Actuators: Attach motors or servos to the legs and joints, ensuring secure mounting and proper connectivity.
Add Sensors: Install sensors to monitor the environment and assist in maintaining balance. Connect these sensors to the control system for data processing.
Program the Control System: Develop and implement algorithms to control the robot’s movement and respond to sensor inputs. Test and refine these algorithms to optimize walking performance.
Test and Adjust: Power the robot and evaluate its walking abilities. Make necessary adjustments to enhance stability, movement efficiency, and overall performance.
Applications
-
1. Exploration:
Walking robots are deployed in challenging environments, such as Mars rovers or underwater exploration, where wheeled robots may be less effective. -
2. Search and Rescue:
These robots are capable of navigating debris and rough terrain to locate and assist survivors during disaster situations, enhancing search and rescue operations. -
3. Entertainment:
Utilized in robotics competitions, exhibitions, and educational demonstrations, walking robots provide engaging and interactive experiences. -
4. Research:
Walking robots offer valuable insights into biomechanics, robotics, and artificial intelligence, contributing to advancements in these fields.



Reviews
There are no reviews yet.